 Audi
Audi BMW
BMW Chery
Chery Citroen
Citroen Daewoo
Daewoo Ford
Ford Honda
Honda Hyundai
Hyundai Infiniti
Infiniti Isuzu
Isuzu Jeep
Jeep Kia
Kia Lexus
Lexus Mazda
Mazda Mercedes
Mercedes Mitsubishi
Mitsubishi Nissan
Nissan Opel
Opel Peugeot
Peugeot Renault
Renault Saab
Saab Skoda
Skoda Subaru
Subaru Suzuki
Suzuki Toyota
Toyota Volkswagen
Volkswagen Volvo
Volvo ВАЗ
ВАЗ ГАЗ
ГАЗ ИЖ
ИЖ Москвич
Москвич УАЗ
УАЗ5.1.1. Рулевое управление с переменной характеристикой (в зависимости от частоты вращения двигателя)
Конструкция и работа системы рулевого механизма в основном заимствованы от модели 626 (GF), за исключением следующего.
На автомобилях Mazda 6 используется телескопический механизм с переменной характеристикой.
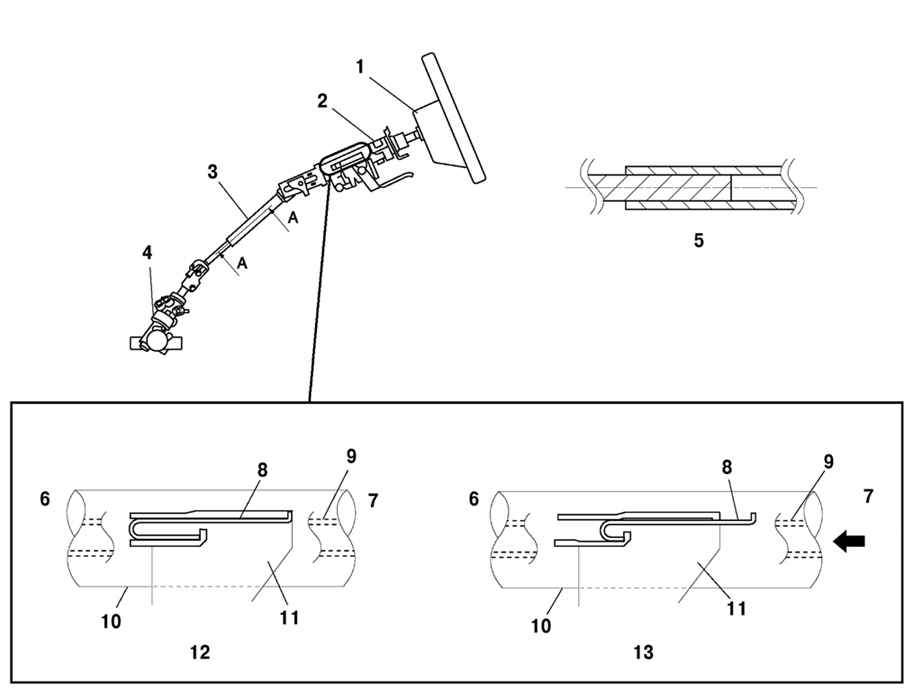 |
Рис. 5.2. Схема работы рулевого механизма с переменной характеристикой: 1 – рулевое колесо; 2 – рулевой вал; 3 – промежуточный вал; 4 – рулевой механизм; 5 – сечение A-A; 6 – со стороны рулевого механизма; 7 – со стороны рулевого колеса; 8 – U-образная пластина; 9 – внутренний вал; 10 – наружная колонка; 11 – кронштейн; 12 – нормальное положение; 13 – при столкновении
|
Рулевой механизм соединен с рулевым валом через промежуточный вал (рис. 5.2). Во время столкновения промежуточный вал разрушается при движении рулевого механизма назад, таким образом достигается снижение энергии удара.
В случае удара тела водителя о рулевое колесо, сила удара передается от рулевого колеса к внутреннему валу, наружной колонке и кронштейну крепления. При этом кронштейн крепления отделяется от панели приборов и весь рулевой вал смещается вперед. После этого U-образная пластина, закрепленная на панели приборов с одной стороны и удерживаемая кронштейном крепления с другой деформируется и поглощает энергию удара.